

Research
Below are my most representative works! For a complete list of publications, please visit my Google Scholar Page Feel free to contact me for any inquiry.
|
GPTR: Gaussian Process Trajectory Representation for Continuous-Time Motion Estimation
Thien-Minh Nguyen, Ziyu Cao, Kailai Li, Shenghai Yuan, Lihua Xie Submitted to TRO. arXiv Code |
|---|---|
|
ULOC: Learning to Localize in Complex Large-Scale Environments with Ultra-Wideband Ranges
Thien-Minh Nguyen, Yizhuo Yang, Tien-Dat Nguyen, Shenghai Yuan, Lihua Xie Submitted to ICRA 2025. arXiv Code |
|
CARIC: A Benchmark for Cooperative Aerial Robots Inspection
Thien-Minh Nguyen, Muqing Cao, Shenghai Yuan, Xinhang Xu, Lihua Xie, Ben M. Chen Challenge at CDC 2023 and IROS 2024. IEEEXplore arXiv Simulator Baseline Solution |
|
MCD VIRAL: Diverse Large-Scale Multi-Campus Dataset for Robot Perception
Thien-Minh Nguyen, Shenghai Yuan, Thien Hoang Nguyen, Pengyu Yin, Haozhi Cao, Lihua Xie, Maciej Wozniak, Patric Jensfelt, Marko Thiel, Justin Ziegenbein, Noel Blunder CVPR 2024. OpenAccess arXiv Data & Software |
|
Eigen Is All You Need: Efficient Lidar-Inertial Continuous-Time Odometry With Internal Association
Thien-Minh Nguyen, Xinhang Xu, Tongxing Jin, Yizhuo Yang, Jianping Li, Shenghai Yuan, and Lihua Xie IEEE Robotics and Automation Letters, 2024. IEEEXplore arXiv Code |

|
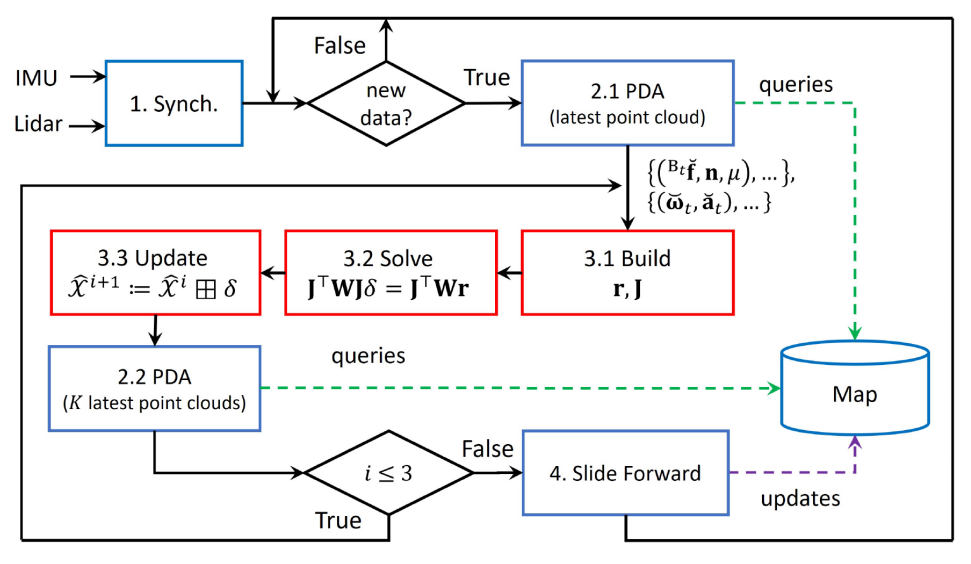
SLICT: Multi-input Multi-scale Surfel-Based Lidar-Inertial Continuous-Time Odometry and Mapping
Thien-Minh Nguyen, Daniel Duberg, Patric Jensfelt, Shenghai Yuan, and Lihua Xie IEEE Robotics and Automation Letters, 2023. IEEEXplore arXiv Code |

|
NTU VIRAL: A Visual-Inertial-Ranging-Lidar Dataset, From an Aerial Vehicle Viewpoint
Thien-Minh Nguyen, Shenghai Yuan, Muqing Cao, Yang Lyu, Thien Hoang Nguyen, and Lihua Xie International Journal on Robotics Research, 2021. IEEEXplore arXiv Data & Software |
|
VIRAL-Fusion: A Visual-Inetial-Ranging-Lidar Sensor Fusion Approach
Thien-Minh Nguyen, Muqing Cao, Shenghai Yuan, Yang Lyu, Thien Hoang Nguyen, Lihua Xie IEEE Transactions on Robotics, 2021. IEEEXplore, arXiv |

|
Persistently-Excited Adaptive Relative Localization and Time-Varying Formation of Robot Swarms
Thien-Minh Nguyen, Muqing Cao, Shenghai Yuan, Yang Lyu, Thien Hoang Nguyen, Lihua Xie IEEE Transactions on Robotics, 2019. IEEEXplore |

|
Integrated UWB-Vision Approach for Autonomous Docking of UAVs in GPS-Denied Environments
Thien-Minh Nguyen, Muqing Cao, Shenghai Yuan, Yang Lyu, Thien Hoang Nguyen, Lihua Xie ICRA, 2019. IEEEXplore |
|
GPS-less Localization and Path-planning for UAV Inspection of 3D Structures.
Thien-Minh Nguyen, Muqing Cao, Shenghai Yuan, Yang Lyu, Thien Hoang Nguyen, Lihua Xie IMAV, 2016. IEEEXplore |